WP descrition: The OLYMPIA project is coordinated by Romain Postoyan (CRAN). Each one of the three technical workpackages is subdivided in two tasks, and is under the responsibility of one coordinator, namely Romain Postoyan (CRAN) for WP1, Sophie Tarbouriech (LAAS) for WP2, and Vincent Andrieu (LAGEPP) for WP3. The interaction and the coordination between the partners will be favoured by the organization of yearly plenary meetings, organized alternatively in Lyon, Nancy and Toulouse, which will bring together the project members. Each meeting will typically last one or two days. One part of the meeting will consist of talks given by project members or external guests presenting their most recent developments in relevant areas for the project. Significant slots will be devoted to presentations given by the students, with the double objective of developing
Coordinator:Romain Postoyan (CRAN)
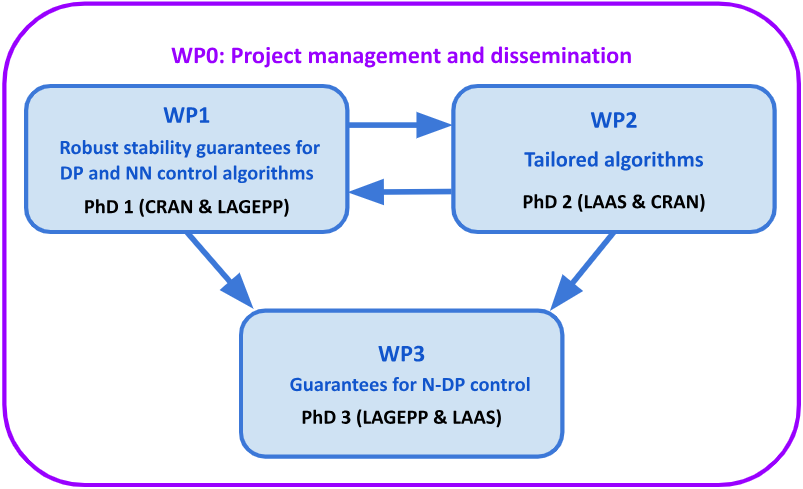
The OLYMPIA project consists in three technical WorkPackages organized according to the following diagram.
WP descrition: The aim of WP1 is to analyse the robustness properties of nonlinear dynamical systems controlled either by DP algorithms or NN-based feedback laws. In particular, we aim at finding a relevant set of sufficient conditions under which input-to-state stability or Lp stability properties can be ensured. WP1 is naturally structured in two tasks: one dedicated to DP algorithms (Task 1.1), the second to control based on NN (Task 1.2). The outcomes of Tasks 1.1 and 1.2 will then be exploited and merged in WP3.
Coordinators:Romain Postoyan (CRAN)
Participants:Jamal Daafouz (CRAN), Sophie Tarbouriech (LAAS), Vincent Andrieu (LAGEPP), Luca Zaccarian (LAAS), Romain Postoyan (CRAN), Jonathan De Brusse (CRAN), Daniele Astolfi (LAGEPP), Madiha Nadri (LAGEPP), Laurent Bako (LAGEPP), Aymane Benchebba (CRAN), Marco Sterlini (LAAS).
Task 1.1: Robust stability guarantees for DP-based control
Below is a list of research topics investigated in the context of this Task/WorkPackage
Robust stability with dynamic programming
While dynamic programming algorithms are attractive for their inherent near-optimality guarantees, the question of the robust stability of systems controlled by such algorithms remain largely open. The aim of this task is to contribute to this challenging and important problem.
Relevant References:
[J9] M. Granzotto, R. Postoyan, D. Nešić, and A.R. Teel. Stability analysis of stochastic optimal control: the linear discounted quadratic case. IEEE Transactions on Automatic Control, 2024.
[J10] M. Granzotto, O. Lindamulage de Silva, R. Postoyan, D. Nesic, and Z.-P. Jiang. Robust stability and near-optimality for policy iteration: For want of recursive feasibility, all is not lost. IEEETransactions on Automatic Control, 2024.
[J11] J. Daafouz, J. Lohéac, I.C. Morărescu, and R. Postoyan. Discrete-time conewise linear systems with finitely many switches. IEEE Transactions on Automatic Control, 2024.
[C1] Beatrice Zambotti, Vincent Andrieu, Daniele Astolfi, Laurent Bako, Madiha Nadri, and Luca Zaccarian. Exponentially stable stubborn observers for discrete-time linear systems. In IEEE Conferenceon Decision and Control, Rio de Janeiro, Brazil, 2025.
[C4] Robert H Moldenhauer, Dragan Nešić, Mathieu Granzotto, Romain Postoyan, and Andrew R Teel. Robust recurrence of discrete-time infinite-horizon stochastic optimal control with discounted cost. In IFAC Symposium on Nonlinear Control Systems, Reykjavik, Iceland, 2025.
[C6] Mohamed Aymane Benchebba, Romain Postoyan, Vincent Andrieu, and Daniele Astolfi. Strictifying storage functions for autonomous discrete-time systems using observers (long version). In IEEE Conference on Decision and Control, Rio de Janeiro, Brazil, 2025.
[C7] J. de Brusse, M. Granzotto, R. Postoyan, and D. Nešić. Policy iteration for discrete-time systems with discounted costs: stability and near-optimality guarantees. In IEEE Conference on Decisionand Control, Milan, Italy, 2024.
[C8] J. Daafouz, J. Lohéac, and R. Postoyan. Mixed regular and impulsive sampled-data LQR. In IEEE Conference on Decision and Control, Milan, Italy, 2024.
Task 1.2: Robust stability guarantees for NN controllers
Below is a list of research topics investigated in the context of this Task/WorkPackage
Robust stability with neural networks
Neural networks can be used to construct feedback laws for complex dynamical systems, the question we aim to address is under which conditions such control strategies stabilize the closed-loop system.
Relevant References:
[J8] S. Mariano, R. Postoyan, and L. Zaccarian. Finite-time stability properties of lur’e systems with piecewise continuous nonlinearities. IEEE Transactions on Automatic Control, 2024.
[C2] Marco Sterlini, Samuele Zoboli, and Sophie Tarbouriech. Layer-wise dynamic event-triggered neural network control for discrete-time nonlinear systems. In IFAC Symposium on Nonlinear Control Systems,Reykjavik, Iceland, 2025.
[C3] E Petri, R Postoyan, and WPMH Heemels. Rhythmic neuromorphic control of a pendulum: A hybrid systems analysis. In IEEE Conference on Decision and Control, Rio de Janeiro, Brazil, 2025.
Contraction and synchronization guarantees
We develop tools to analyse contraction and synchronization properties of dynamical systems with the final goal of being exploited to analyse and design neural networks.
Relevant References:
[J3] Mattia Giaccagli, Pietro Lorenzetti, Daniele Astolfi, and Vincent Andrieu. Pi-control for nonlinear systems with multiple equilibria via 2-contraction. hal-05053341, 2025.
[J4] A. Cellier-Devaux, L. Zaccarian, D. Astolfi, and Vincent V. Andrieu. Synchronization of multi-agent hybrid systems with synchronous state-dependent jumps. IEEE Control Systems Letters, 2025.
[J6] Samuele Zoboli, Andreu Cecilia, and Sophie Tarbouriech. Dynamic output-feedback design for generalized lyapunov inequalities. hal-04738534, 2024.
WP descrition: The objectives of WP2 are to modify DP and NN control strategies to endow the closed-loop system with additional desirable properties compared to WP1 (Task 2.1). We also aim at exploiting system theoretic properties to reduce the computation effort associated with these control strategies (Task 2.2).
Coordinators:Sophie Tarbouriech (LAAS)
Participants:Jamal Daafouz (CRAN), Sophie Tarbouriech (LAAS), Vincent Andrieu (LAGEPP), Luca Zaccarian (LAAS), Romain Postoyan (CRAN), Jonathan De Brusse (CRAN), Daniele Astolfi (LAGEPP), Pierre Franck (LAAS), Aymane Benchebba (CRAN), Beatrice Zambotti (LAGEPP), Marco Sterlini (LAAS), Samuele Zoboli (LAAS).
Task 2.1: Redesigning NN and DP algorithms
Below is a list of research topics investigated in the context of this Task/WorkPackage
Tailored dynamic programming algorithms
When a dynamic programming algorithm does not meet desired requirements (like recursive feasibility, robust stabilizing properties etc.), it is needed to redesign or tailor it to suit our purpose. This is the goal of this task.
Relevant References:
[J10] M. Granzotto, O. Lindamulage de Silva, R. Postoyan, D. Nesic, and Z.-P. Jiang. Robust stability and near-optimality for policy iteration: For want of recursive feasibility, all is not lost. IEEETransactions on Automatic Control, 2024.
[J11] J. Daafouz, J. Lohéac, I.C. Morărescu, and R. Postoyan. Discrete-time conewise linear systems with finitely many switches. IEEE Transactions on Automatic Control, 2024.
[C5] Mathieu Granzotto, Romain Postoyan, Dragan Nešić, Jamal Daafouz, and Lucian Buşoniu. An optimistic planning algorithm for switched discrete-time lqr. In IEEE Conference on Decision andControl, Rio de Janeiro, Brazil, 2025.
Task 2.2: Computation-efficient algorithms
Below is a list of research topics investigated in the context of this Task/WorkPackage
Computation-efficient algorithms
The goal of this task is to reduce the computational effort of DP and NN techniques. Among other approaches, we develop event-triggered control approaches for this purpose.
Relevant References:
[J1] C Lisbôa, JV Flores, LG Moreira, JM Gomes da Silva Jr, and S Tarbouriech. Robust dynamic periodic event-triggered control of lur’e systems. IFAC-PapersOnLine, 59(16):337–342, 2025.
[J2] A. Iannelli and R. Postoyan. A hybrid systems framework for data-based adaptive control of linear time-varying systems. IEEE Transactions on Automatic Control, 2025.
[J12] A. Cristofaro and L. Zaccarian. Adaptive pseudo-inverse observers for output redundant discrete-time linear systems. IEEE Transactions on Automatic Control, 69(11):7403 – 7417, 2024.
[J17] R. Bertollo, M. Schwegel, A. Kugi, and L. Zaccarian. Integrate-and-reset feedback and feedforward for a solenoid with unknown parameters. IEEE Control Systems Letters, 8:1511 – 1516, 2024.
[C2] Marco Sterlini, Samuele Zoboli, and Sophie Tarbouriech. Layer-wise dynamic event-triggered neural network control for discrete-time nonlinear systems. In IFAC Symposium on Nonlinear Control Systems,Reykjavik, Iceland, 2025.
Multi-agent techniques
Going beyond the initial goals of the project, we also explore multi-agent techniques to cope with distributed systems.
WP descrition: The aim of WP3 is to merge the outcomes of WP1 and WP2 to endow systems controlled by N-DP with robust stability and performance guarantees. This workpackage also addresses challenges related to the implementation of such controllers.
Coordinator:Vincent Andrieu (LAGEPP)
Participants:Jamal Daafouz (CRAN), Sophie Tarbouriech (LAAS), Vincent Andrieu (LAGEPP), Luca Zaccarian (LAAS), Romain Postoyan (CRAN), Madiha Nadri (LAGEPP), Laurent Bako (LAGEPP), Pierre Franck (LAAS), Samuele Zoboli (LAAS).
Task 3.1: Robust stability for N-DP control
Below is a list of research topics investigated in the context of this Task/WorkPackage
Data driven methods
When a model of the plant is not available or too complicated to work with, data-driven methods are an appealing alternative, which are highly compatible with neural networks and dynamic programming algorithms. The challenge in the context of this project is to endow such control strategies with stability guarantees.
Relevant References:
[J2] A. Iannelli and R. Postoyan. A hybrid systems framework for data-based adaptive control of linear time-varying systems. IEEE Transactions on Automatic Control, 2025.
[J7] A. Seuret and S. Tarbouriech. Robust data-driven control design for linear systems subject to input saturation. IEEE Transactions on Automatic Control, 69(9):6191 – 6198, 2024.
Task 3.2: Finite-iteration algorithms
Below is a list of research topics investigated in the context of this Task/WorkPackage
Safety guarantees
We investigate neuro-dynamic programming control strategies, and more generally optimization-based control methods, to endow the closed-loop systems with safety guarantees (like collision avoidance).
Relevant References:
[J18] R. Ballaben, P. Braun, and L. Zaccarian. Lyapunov-based avoidance controllers with stabilizing feedback. IEEE Control Systems Letters, 8:2475–1456, 2024.
Optimization-based control and estimation
The goal of this task is to devise efficient optimization-based control strategies with stability, or safety guarantees.
Relevant References:
[J14] J. Breeden, L. Zaccarian, and D. Panagou. Robust safety-critical control for systems with sporadic measurements and dwell time constraints. IEEE Control Systems Letters, 2024.
[J15] P. Braun, G. Giordano, C.M. Kellett, I. Shames, and L. Zaccarian. Optimizing shifted stabilizers with asymmetric input saturation. IEEE Transactions on Automatic Control, 2024.
[J18] R. Ballaben, P. Braun, and L. Zaccarian. Lyapunov-based avoidance controllers with stabilizing feedback. IEEE Control Systems Letters, 8:2475–1456, 2024.